

/https%3A%2F%2Fstorage.canalblog.com%2F58%2F65%2F369792%2F40023819_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F05%2F09%2F369792%2F35334365_o.jpg)
La section helico
Reference pieces détachées ROBBE
CLIC ROBBE_1
CLIC ROBBE_2
JE NE LE CONSEIL PAS ::j'ai commandé des pieces( livraison express!!! ) le 29/11/2007 et le 8/12/2007 pas de nouvelles ..........meme pas un petit mail et en plus ,plus chere quand magasin !!!!!!!!!!!!!!!!!!!!!!!!a suivre ............
Après beaucoup d'ennuis avec le DF35 (les pignons d'entraînement du rotor se 'bouffe " a la vitesse grand V et sont très dur a retrouver je me suis rabattu sur un châssis de COWN III de chez robbe .
CROWN III
Hélicoptère électrique pré assemblé avec pas collectif à 90° TS (H1) en structure combinée plastique renforcé fibre de verre et aluminium
Ce petit hélicoptère pré assemblé et livré dans une valise très élégante en aluminium, n´a pas volé son nom.
La mise en oeuvre conséquente d´aluminium et de pastique renforcé fibre de verre permet d´obtenir un excellent rapport poids/résistance.
Par ailleurs, il permet une mise en oeuvre sans problème avec la plus faible maintenance possible.
Pour le débutant comme pour le fan de 3D, le modèle Crown III est le modèle idéal pour le vol en salle comme pour le vol en plein air.
Caractéristiques techniques:
- Diamètre du rotor principal: 630 mm
- Poids en ordre de vol: 545 g
- Hauteur: 210 mm
- Longueur: 570 mm


Maintenant le plus dur reste a faire le montage et les réglages ...
C'est pas le mien il est en attente du gyro FUTABA 240
pas le mien il est en attente du gyro FUTABA 240
Tout reçu tout monté et au 1er VOL la vis en laiton du rotor de queue qui se casse ?????????

j'en est bricolé une avec une vis inox diametre 2 mm et une bonne lime !!!!! ça a l'air de fonctionner .
Le GYRO
La première question que les gens posent toujours est : "Puis-je faire voler un hélico sans gyroscope ?" Pour faire simple, la réponse est "Non". La queue de l'hélicoptère serait trop sensible aux courants d'air aléatoires. Avant l'invention des gyro pour hélicoptères, le record du monde de durée de vol d'hélicoptère RC était de 5,65 secondes par John Burkham en 1969 avec le modèle "Super Susie".
Un gyro conservateur de cap est fortement recommandé pour les débutants. A cela 4 raisons :
Un gyro à conservateur de cap est beaucoup plus facile à configurer qu'un gyro proportionnel. Le gyro proportionnel nécessite un réglage correct de la courbe "revo mix" avant de pouvoir apprendre le vol stationnaire, et ce n'est pas évident à faire par un débutant.
Le gyro conservateur de cap va "verrouiller" la queue dans une direction, plutôt que simplement atténuer ses mouvements aléatoires. C'est très intéressant car vous avez seulement besoin d'apprendre à maîtriser 2 axes au lieu de 3. Ce qui veut dire que vous pouvez apprendre à contrôler le manche de droite en premier (en mode 2), au lieu d'apprendre à gérer les deux manches simultanément. Cela rend l'apprentissage du vol stationnaire beaucoup plus facile.
Le "revo mix" (nécessaire pour un gyro proportionnel ne compensera pas la chute de tension de la batterie au fur et à mesure que celle-ci se décharge. Donc, vers la fin du vol, vous devrez maintenir l'anticouple pour empêcher l'hélicoptère de tourner. Cela rend l'apprentissage du vol stationnaire plus difficile.
Avec un gyro proportionnel, il faudra changer le revo mix à chaque fois que le poids de l'hélico ou la vitesse de rotation du rotor change.
Si vous faites une modification qui change le poids de l'hélico, vous devrez réajuster le revo mix.
Si vous changez de pignon, vous devrez réajuster le revo mix.
Si vous avez des packs d'accu de poids différents, il faudra ajuster le revo mix à chaque changement de batterie.
Le GY240 est un gyro de début très populaire et très facile à régler. De plus, il ne nécessite pas de voie pour la sensibilité et peut donc être utilisé avec une radio 4 voies. Cependant, il a une vitesse de pirouette très lente et vous devrez en changer à un moment.
 |
Gyro Futaba GY240 http://www.tedani.com/futaba-gy240-gyro-p-280.html?currency=EUR
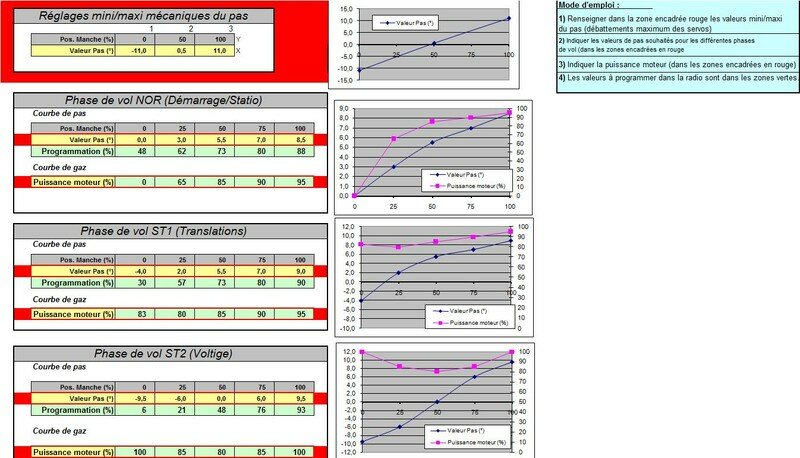
Les réglages
Au depart avec Fly , Gé , Mickel nous sommes partis cach, TEST de réglage de la Radio sans debrancher le moteur : resultat un helico dans le mur ...... (fracasser le joujou de Fly ) Aprés fracasser le joujou de Gé , et celui de Mickel Uun peux moins en une semaine 3 helico au tapis le mien en cours de Upgrade est toujours intact mais n'a pas encore beaucoup volé (si si 30 cm de haut et 30" de vol .....)
Conclusion l'helico ne tolére pas de "a peu prés " donc nous nous somme mis a étudier et comprendre ( un peu tard) les reglages de l'helico et la programation de la radio . et la c'est du bonheur
Ca vole droit comme un I (dixit FLY)
Alors quelques info trouver sur le net et misent en application .......
..Un exemple de courbes de reglage ci aprés
PLATEAU CYCLIQUE : |
|
PREMIERE ETAPE : | |
| |
SECONDE ETAPE : | |
TROISIEME ET DERNIERE ETAPE : Le ROTOR anti couple Cette photo vous montre l'écart entre les deux pales du rotor anti-couple lorsque le manche de gaz est au milieu de sa course (vol stationnaire). Replier les pales de façon à rapprocher leurs extrémités le plus possible. Ceci vous permettra d'avoir un bon préréglage du neutre de l'anti-couple. La côte est de 15 mm a partir des bouts de pales. |
|

Réglage du tracking :
C'est un réglage important qui doit-être fait avant le premier vol suivant le montage de l'appareil où une intervention sur la tête de rotor. Le tracking est une légère différence de pas entre les 2 pales, cela se traduit par une rotation du rotor sur 2 plan différent. Le vol s'en trouve dégradé et des vibrations sont présentes.
HIROBO fourni 2 petites bandes autocollantes, une rouge et une noir, elles sont à collé sur l'extrémité de chaque pale afin de les repérer. L'hélicoptère est posé au sol, moteur en marche, le manche de gaz est poussé prudemment jusqu'a la limite du décollage, en alignant le regard avec le rotor on repère les différences de plan et avec la couleur on détermine qu'elle pales est dessus ou dessous.

Le réglage se fait en allongeant ou raccourcissant les 2 biellettes qui commande les pieds de pales.
Dans le cas de la figure ci-dessus il faut diminué le pas de la pale rouge, c'est à dire en allongeant la biellette qui commande la pale rouge. On peu aussi augmenter le pas de la pale noire en raccourcissant la biellette qui commande la pale noire.
Une fois le réglage effectué il faut repéré le pied de pale par rapport à la pale montée lors du réglage, pour toujours remonté la pale sur le pied de pale correspondant. Une petite marque de peinture suffit.
Merci a http://helico.rc.free.fr/reglages.htm
Attention:
Observer systématiquement un écart de sécurité de 5 mètres au minimum.
Lancer le moteur et vérifier l’unité du plan de rotation des pales alors que le système tourne. Si, au régime du vol stationnaire, il se produisant que les pales ne tournent plus sur le même plan, il faut soit augmenter l’angle d’attaque de la pale B la plus basse soit réduire dans le sens contraire l’angle d’attaque de la pale la plus haute A. Pour ce faire, retirer la tringle qui relie le plateau cyclique au palonnier de mixage du plateau cyclique et la tourner de 1 à 2 tours dans la direction correspondante.
Le DF35 malgres plusieurs modif ......


 Site: voir Liens
Site: voir Liens


Helico de Phil.une vraie M....E il se déglingue en vol les materiaux sont pas de bonne qualité !!!
il faut tout changer mauvais investissement .......
Le DF36

Helico de Gé un peu mieux que le 35 mais nous verrons a l'usage et surtout a l'usure
Caractéristiques :
. Diamètre du rotor : 630 mm
. Longueur du fuselage : 540 mm
. Largeur : 135 mm
. Poids total + batterie : approx 580 g
Mon premier Helico
BELL 47G
Prêt à voler: 95% pré monté
Moteurs 180 SHX puissants
Rotors coaxiaux contrarotatif supprimant l’effet de couple moteur
Un plateau cyclique coulissant limite les frictions de la fonction d’anti-couple
L’axe de roulis des deux rotors est piloté par un moteur spécifique
Les tours de chaque moteur peuvent être contrôlés
Le faible poids des rotors assure une bonne réponse à la commande des gaz
Le stationnaire est possible et ne demande que de faibles actions sur les commandes d’anti-couple
Les deux rotors sont totalement commandés indépendamment Le fuselage est détaillé de manière réaliste
Cockpit et sièges maquette
Skis renforcés
Des pales de rotor de rechange sont inclues dans la boîte
Unité 4 en 1 contient le variateur, mixeur, gyro et récepteur
Des accus LiPo puissants et légers sont inclus dans le kit
Pales de rotor symmètriques et légères
Modèle pret à voler avec accu et radio comande 4 voies inclus.
Caractéristiques :
Longueur sans rotors, env. 360mm
Hauteur, env. 180mm
Largeur sans rotors, env. 100mm
Ø des rotors : 340mm
Poids en ordre de vol, env. 210 g
Ensemble R/C : FM 4 voies
Alimentation : Accu LiPo 7,4 V / 800 mAh
Facile


2 Bell 47 G avec camera embarquée ( vol indoor)
http://www.dailymotion.com/philou006/video/xsvhj_bell-suite_videogames
http://www.dailymotion.com/philou006/video/6022180
http://www.dailymotion.com/philou006/video/x27p49_bell-47-g-2007_videogames
http://www.dailymotion.com/philou006/video/xksqh_bell-47-g_tech
Ce qui ne faut pas faire
http://www.dailymotion.com/philou006/video/xcsk6_helico-video_fun
http://www.dailymotion.com/philou006/video/xdmj4_helocrash_videogames
LE JOUJOU DE M. C pas tres patient le Mitch.....
Avant

Pendant

Aprés

Le temps de la recherche

![]()
Dessin de L. de Vinci pour une machine volante à voilure tournante
Depuis le IVe siècle av. J.-C., les Chinois faisaient voler de petits jouets sur le principe de l'hélicoptère pour fasciner les enfants. Par l'intermédiaire du commerce, on sait que ce jouet est arrivé jusqu'en Europe. En effet, il apparaît dans une peinture de 1463. Le livre Pao Phu Tau du IVe siècle trace également l'ébauche d'un aéronef à ailes rotatives.
En Europe, le premier à s'intéresser au concept d'hélicoptère fut le savant italien Léonard de Vinci. Un de ses dessins, daté de 1486, montre une machine volante à aile tournante, basée sur le principe de la vis d'Archimède. Cependant, en l'absence de connaissances en aérodynamique et sans motorisation adéquate, il restera à l'état de projet.
Il faudra attendre la fin du XVIIIe siècle pour qu'une véritable avancée se produise : en 1754 le Russe Lomonossov essaie devant un aréopage scientifique un modèle complexe à deux rotors coaxiaux contrarotatifs, mûs par un mécanisme d'horlogerie, et démontre l'existence d'une force de sustentation. Le 26 avril 1784, les Français Launoy et Bienvenu font voler devant l'Académie royale des sciences un petit modèle très simple mû par un mécanisme de ressort à arc. En 1877, un autre Italien, Enrico Forlanini parvient à faire voler un petit hélicoptère à vapeur. Dix ans plus tard le Français Trouve fait décoller un modèle doté d'un moteur électrique, dont l'alimentation est obtenue depuis le sol par de fins fils de cuivre. En 1905 les frères Henri et Armand Dufaux font décoller verticalement un appareil à moteur à explosion emportant sa propre énergie ainsi qu'une charge de 6 kg.
C'est en 1907 que le premier véritable décollage au monde d'un hélicoptère à plus de 1,50 mètre du sol est réussi, en Normandie à Coquainvilliers, près de Lisieux. Cet engin de 203 kilos est inventé et piloté par Paul Cornu. D'autres essais significatifs d'hélicoptères emportant un homme sont réalisés la même année, par Louis Breguet et Charles Richet à Douai. C'est également l'époque des essais de Maurice Léger.
C'est la bascule historique entre des modèles de petite taille et des machines faites pour emporter leur pilote. Puis le Danois Jens Christian Ellehammer en 1912, l'Argentin Raoul Pateras Pescara de Castelluccio, marquis de Pescara ( 1890 - 1966), et le Français Étienne Oehmichen à partir de 1920, réussissent à voler de mieux en mieux. Le marquis Raoul Pateras Pescara en particulier, est passionné par l'aviation.Tous ses appareils sont de véritables hélicoptères, pour être équipés de deux rotors coaxiaux contrarotatifs ( le Larousse de 1922 illustre le mot hélicoptère avec la photo du Pescara de 1919 à Barcelone accompagnée du texte : "Système Pescara"). Pour assurer les déplacements, le pilote dispose d'un manche à balai qu'il peut incliner dans la direction qu'il veut suivre. Il en résulte une variation cyclique du pas de chaque pale à chaque rotation. Son hélicoptère 2F boucle le kilomètre le 16 janvier 1924 en 10 minutes 33 secondes fortement secoué par des rafales. Une rafale plus forte fit qu'à 850 m, la béquille arrière toucha le sol ; il obtint le record du monde de distance en hélicoptère le 18 avril 1924[1]. L'hélicoptère PESCARA type 2R comprend 2 hélices de 6,4 m de diamètre, à 6 paires de pales de 0,4 m de large, tournant en sens inverse sur axes verticaux. La longueur de la nacelle est de 5 m et la hauteur est d'environ 3,2 m. Le moteur est un Rhône de 160 CV.
Finalement, Étienne Oehmichen couvre un kilomètre en circuit fermé le 4 mai 1924 à Arbouans (près de Montbéliard). Son appareil est le n° 2 qui se présente avec quatre hélices sustentatrices, quatre hélices d'évolution, une hélice tractive. Un article de 4 pages avec photos « L'Hélicoptère supplantera-t-il l'avion » de P. James dans le n° 142 du 18 mai 1922 de Sciences et Voyages. L'appareil d'Oehmichen est décrit comme une sorte d'hélicoptère car il n'a pu être classé par l'auteur dans les deux catégories de véritables hélicoptères. En 1927, est publié une étude expérimentale des voilures tournantes par l'Ingénieur de l'Aéronautique M. Lapresle. En effet le Laboratoire Eiffel est chargé par le Service Technique et Industriel de l'Aéronautique pendant les années 1924, 1925 et 1926 d'étudier par l'essai de maquettes de voilures d'autogires, de gyroptères et d'hélicoptères leurs comportements. Le recueil des essais a été publié en avril 1927. Il est rappelé qu'ils entendent un fonctionnement en hélicoptère celui relatif au cas où la voilure doit assurer à elle seule la sustentation et la translation.

![]()
Les Hélicoptères du Marquis de Pescara des années 1921 à 1925
La période 1919 à 1924 voit donc les réussites d'Étienne Oehmichen et Raul Pateras Pescara. En effet, en 1924 la France, détenait avec ce dernier, le 18 avril le record de distance en véritable hélicoptère enregistré par la Fédération aéronautique internationale (FAI) et avec Oehmichen, ceux de distance en circuit fermé et d'altitude avec un combiné.
Louis Breguet et René Dorand réussirent à faire voler durant les années trente un appareil très réussi, le « Gyroplane Laboratoire », qui atteignit 100 km/h et vola plus d'une heure. Cependant, l'hélicoptère restera un véhicule expérimental jusqu'aux années 1940.
Entre temps, de nombreux pionniers se sont lancés dans l'aventure, dont les Allemands Heinrich Focke en 1937, Anton Flettner en 1939 et l'Américain d'origine russe Igor Sikorsky en 1939 avec son VS-300.
Comme pour l'avion, la vitesse relative de l'air et de la voilure génère une action mécanique qui permet à l'engin de voler. On distingue deux composantes de cette action aérodynamique:
- la traînée qui est la résistance à l'avancement. De son action sur le rotor de l'hélicoptère, il résulte un couple tendant à faire tourner l'appareil autour de son axe, d'où la nécessité d'un dispositif anti-couple.
- la portance qui soulève l'appareil.
Le contrôle d'un appareil repose alors sur la gestion de cette portance. Alors que sur les avions, des volets permettent de modifier la portance des ailes pour virer monter... sur l'hélicoptère, comme sur les éoliennes, on modifie le pas et l'inclinaison des pales. Cependant, il existe une différence. Si sur l'avion on agit individuellement sur chaque gouverne, sur l'hélicoptère on contrôle la portance d'une pale suivant sa position par rapport à l'appareil. C'est le rôle du plateau cyclique, pièce principale du dispositif de commande de vol.
Vol stationnaire.
Le rotor de l'hélicoptère étant entraîné à vitesse constante, les déplacements verticaux de l'hélicoptère sont obtenus par la seule modification du pas des pales. À ce stade du vol, la portance des pales reste identique sur un tour du rotor. Il existe une position où la portance globale s'oppose exactement au poids de l'appareil : l'hélicoptère peut rester immobile. Si elle lui est inférieure, l'appareil descend. Si elle est supérieure, il monte.
|
Equilibre en vol stationnaire |
Déséquilibre |
déplacement stabilisé |



Vol en translation.
Pour que l'hélicoptère avance il faut une force à composante horizontale. Si on augmente la portance des pales lorsqu'elles passent derrière le rotor, leur plan de rotation s'incline vers l'avant, grâce à une articulation en battement reliant chaque pale à l'axe de rotation, et l'inclinaison de la portance produit la composante horizontale nécessaire. Il reste toutefois une composante verticale principale qui s'oppose au poids permettant le maintien en l'air, et la composante horizontale motrice engendre le mouvement d'avancement, donc accélération jusqu'à une vitesse où la traînée globale (résistance à l'avancement de l'hélicoptère) s'équilibrera avec la composante motrice.
Le principe est le même quelle que soit la direction de déplacement souhaitée.
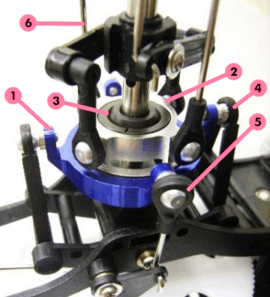
| Plateau cyclique |
|
1 couronne fixe (bleu) 2 couronne mobile (argent) 3 roulement 4 tige de commande (tangage) 5 tige de commande (roulis) 6 biellette de pas (vers la pale) Le plateau cyclique est l'élément essentiel permettant de piloter un hélicoptère. Il permet de transmettre aux pales du rotor principal les ordres de pilotage (sollicitations) donnés par le pilote (en tant qu'être humain) au moyen des leviers de commande (collectif et cyclique) ou par le pilote automatique qui agit directement au niveau de la timonerie et des vérins ou servocommandes. La difficulté de cette transmission vient du fait que le mouvement doit passer d'un système inférieur "immobile" (la cellule de l'hélicoptère) à un système supérieur en rotation (le rotor). Pour ce faire, les deux systèmes ne sont en contact l'un avec l'autre qu'au niveau d'un roulement dont une partie est solidaire de la cellule et l'autre des éléments dits dynamiques. Le plateau est en fait composé de deux couronnes superposées coulissant autour du mât du rotor principal, lequel tourne sur lui-même, entraîné par le ou les moteurs au travers de la boîte de transmission principale, et se termine par un moyeu auquel sont fixées les pales. La couronne supérieure (mobile) comporte des biellettes de pas dont chacune est reliée à une pale et fait varier son angle d'incidence (voir aussi hélice) en fonction des mouvements du plateau. Un déplacement vertical de l'ensemble du plateau fera changer l'angle d'incidence de toutes les pales en même temps. Ce mouvement est effectué par le levier dit collectif actionné par la main gauche du pilote et est destiné à faire monter ou descendre l'appareil. Si l'on fait basculer le plateau vers un côté, on augmente l'angle d'incidence des pales du côté qui monte et inversement, on réduit celui des pales situées du côté qui s'abaisse. Lorsque l'angle d'incidence d'une pale augmente et que celui de la pale opposée diminue, la portance augmente d'un côté et diminue de l'autre. Ceci a pour effet de faire basculer le plan décrit par la rotation des pales (appelé le disque rotor) et de déplacer la composante de la force de sustentation globale qui tend alors à tirer l'appareil vers le côté où penche le disque rotor. Ce moyen permet de diriger un hélicoptère comme avec un "manche à balai" (tirer vers soi pour monter, pousser pour descendre etc.) avec cette particularité qu'on peut imprimer à l'hélicoptère un mouvement de translation latérale dans n'importe quelle direction. La vitesse sera cependant très faible dans les autres directions que vers l'avant pour de nombreuses raisons : interaction du souffle du rotor principal avec celui du rotor anti-couple, besoin limité aux manœuvres en espace réduit (voir vol stationnaire), aérodynamique de la cellule (emports externes), visibilité etc. Ces mouvements sont engendrés à l'aide du levier de commande dit cyclique que le pilote actionne avec sa main droite. Du fait du retard de réaction des pales en rotation (effet gyroscopique), il faut créer l'impulsion 90° avant le point où l'on désire que la pale change de position. La timonerie entre les leviers de commande et les servocommandes amplifiant l'effort passe au travers d'un dispositif appelé combinateur qui retransmet sur une seule tige de commande (une par axe, donc deux au moins pour le tangage et le roulis) les sollicitations venant des côtés gauche (collectif) et droit (cyclique) émises par les mains du pilote ou par le pilote automatique. |



/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)
/https%3A%2F%2Fstorage.canalblog.com%2F07%2F27%2F369792%2F100977860_m.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F48%2F34%2F369792%2F100977566_m.jpg)